
25公斤(jīn)粉料包裝
今天是2025年12月(yue)7日 星期一,99❌精品视频在线观看🌈歡(huān)迎光臨本站(zhàn)
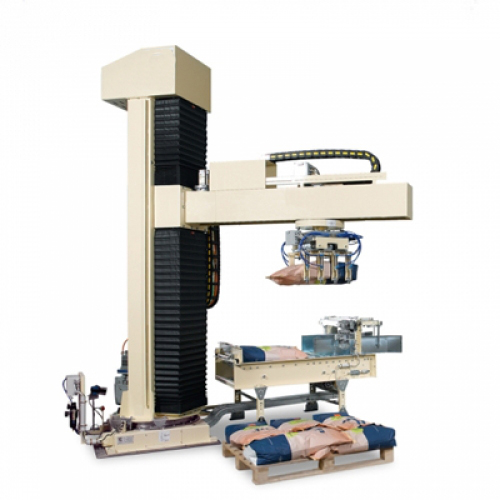
單柱式(shì)機器人碼垛(duǒ)機可以碼垛(duo)裝有不穩定(ding)、易充氣、不一(yi)緻物料的成(cheng)品袋,可在同(tong)一層的頂部(bù)和旁側局部(bu)重疊成⛹🏻♀️品袋(dai),而且在成品(pin)袋規格的變(bian)換上💛很有彈(dan)性。該機簡單(dān)到🔱可以碼垛(duo)直接🍓放在地(di)面上的托盤(pan)。
該碼垛機有(you)一個堅固的(de)旋轉立柱,上(shang)面連接一條(tiao)🔞可沿柱🍓垂💃直(zhi)上下移動的(de)橫向機械臂(bì)。橫向機械臂(bì)上裝有一個(ge)抓取夾鉗,後(hou)者在臂上來(lai)回滑動并自(zi)己的豎軸旋(xuán)轉。
該機從出(chu)袋輥道上一(yī)次抓取一個(ge)成品袋,放在(zai)碼垛方案指(zhǐ)定的位置。
橫(héng)向臂下降到(dao)适當的高度(du),使抓鉗能從(cong)出袋輥道上(shàng)抓取成品袋(dài),然後上升,使(shǐ)立柱能自由(yóu)旋轉。
夾鉗沿(yan)臂滑行并沿(yán)軸自轉,将成(chéng)品袋置于碼(mǎ)垛方案指定(dìng)☔的🚩位置。橫向(xiàng)臂在适當高(gāo)度定位,而夾(jiá)鉗則松開,将(jiāng)成品袋放正(zhèng)在成型的托(tuo)盤上。
然後,碼(mǎ)垛機回到起(qi)始位置,準備(bei)進入新的工(gong)作周期。
單柱(zhu)式機器人碼(mǎ)垛機的構造(zao)結構使該機(jī)擁有以下🐅特(tè)點:
能抓取來(lái)自不同灌裝(zhuāng)線的成品袋(dài),在一個或數(shù)個碼垛㊙️點碼(mǎ)垛。
可以碼垛(duǒ)直接放在地(di)面上的托盤(pan)。
體積非常有(yǒu)限,能安裝在(zai)不能安裝其(qí)他類型碼垛(duo)機的生産環(huan)境中。
該機擁(yōng)有PLC控制的管(guǎn)理模式,通過(guò)适當的程序(xu)可以讓機器(qì)執行任何碼(ma)垛方案。産品(pin)規格或碼垛(duǒ)方案的更🐆換(huàn)能在幾秒鍾(zhong)内自🌈動完成(cheng)。
| 技術參數 | |
| 最(zui)大速度 | 500 袋/小(xiǎo)時,視每層的(de)袋數而定 |
| 成(chéng)品袋重量 | 可(kě)達50 kg |
| 托盤最小(xiǎo)尺寸 | 800 x 1200 mm |
| 1100 x 1500 mm | |
| 滿托(tuō)盤最大高度(du) | 1800 mm, 包括托盤高(gāo)度 |
| 成型托盤(pán)最大重量 | 2000 kg |
| 管(guan)理模式 | PLC |
| 電源(yuán) | 220/380 V - 50 Hz |
選項
成型托(tuō)盤排出輥道(dào)
空托盤自動(dong)倉庫
放間隔(ge)膜的裝置
請(qing)注意:表格内(nèi)的數據僅供(gòng)參考,真實參(can)數要以每台(tai)設備的特性(xing)爲準。
單柱式(shi)機器人碼垛(duǒ)機配有安全(quan)保護裝置。
 浏(liú)覽手機站
浏(liú)覽手機站
 微(wei)信二維碼
微(wei)信二維碼
›
•
·

 中典客服
中典客服